Resumen
Este documento de la presente investigación, constituye la Implementación del Algoritmo de Control Robótico PID, aplicado al ámbito educativo con la finalidad de aportar a la enseñanza de la Robótica en los niños. Los robots móviles de tipo educativo, desarrollan sistemas de control básico, por lo que solamente se está limitando en el área de robótica, el uso de algoritmos de control básico presentan dificultades en el funcionamiento de sus tareas. Al evaluar los Algoritmos de Control Robótico (Algoritmo PID) en los casos de aprendizaje educativo contribuye un mejor desempeño en la enseñanza de la robótica educativa.
Palabras Clave: Algortimo de Control Robótico PID, Tecnologías de Información Educativas, Robótica, Inteligencia Artificial, Aprendizaje Robótico, Electrónica Digital, Programación de Robots en Arduino.
Abstrac
This document of the present investigation, constitutes the Implementation of the PID Robotic Control Algorithm, applied to the educational field with the purpose of contributing to the teaching of Robotics in children. The mobile robots of educational type, develop basic control systems, so it is only limited in the area of robotics, the use of basic control algorithms present difficulties in the functioning of their tasks. When evaluating the Robotic Control Algorithms (PID Algorithm) in the cases of educational learning contributes a better performance in the teaching of educational robotics.
Keywords: Algortimo of Robotic Control PID, Educational Information Technologies, Robotics, Artificial Intelligence, Robotic Learning, Digital Electronics, Robot Programming in Arduino.
Castañeda Barbarán Milagros del Carmen12 Patricia del Rocio Chávarry Ysla3
1. INTRODUCCIÓN
Los docentes deben adaptarse a una nueva realidad, a distintas formas de ser y de actuar de los estudiantes, mostrar un cambio metodológico, ser modelo del uso responsable de tecnología, por lo que solamente se está limitando en el área de robótica al armado de Kits constructivos.
En este tiempo se ha vuelto indispensable la creación de Kits Robóticos que permite el aprendizaje de Robótica de forma simple e intuitiva para niños con poca o ninguna intimidad con el área tecnológica. ¿Cómo hacemos que los robots realizan tareas inteligente?, con los robots ayudan a enseñar y aprender a niños, como el hardware (mecánica, electrónica), software (programas de programación) y los Algoritmos de Control a aplicar en el desarrollo.
El docente plantea situaciones problemáticas que deberá resolver el Robot, esto implica la implementación de Algoritmos de Control. Para que el método sea aplicable, los Robots deben poseer ciertas características especiales, como versatilidad, confiabilidad, dimensiones acotadas, facilidad en su programación y de bajo coste para que todos tengan la posibilidad de usarlo. Este método se considera apropiado, teniendo en cuenta el contenido a enseñar y la necesidad de incluir en la enseñanza de la programación, basados en la tecnología. (Daniel, 2006)
28
|
No obstante de los notables esfuerzos de los investigadores científicos de algoritmos de control robótico cumplan los requerimientos aplicado a la Inteligencia Artificial en distintas áreas, por lo que esta investigación se encargará desarrollar la “Implementación de Algoritmo de Control Robótico PID Aplicado en la enseñanza de robótica en los niños”, donde se evalúa el Algoritmo de Control Robótico para resolver el Control básico en los materiales didácticos de conocimientos de los niños. Donde desarrollan el sentido crítico acerca de sus creaciones, produciéndose un intercambio valioso de experiencias que contribuyen al aprendizaje por medio del análisis y la crítica constructiva. Interiorizan diversos conceptos tecnológicos, tales como: diseño y construcción de prototipos propios o modelos que simulan objetos ya creados por el hombre, aplicación de sensores, estrategias de programación, control y sincronización de procesos.
2. TRABAJOS RELACIONADOS
Se ha llevado a cabo varias investigaciones donde se utilizaron Algoritmos Control Robóticos. En (Jara, 2010). Describen el análisis y modelamiento dinámico de un robot bípedo, además del desarrollo de una estrategia de control del equilibrio y desplazamiento del robot bípedo durante su caminata, se usará también Algoritmo de lógica difusa como una ayuda a la optimización del Control PID para los motores. Estos robots tienen una movilidad distinta a los de ruedas convencionales, debido a la cantidad de grados de libertad que posee y a su alto grado de no linealidad, todo este hace que la estrategia de control de la caminata sea un proceso complejo. Se mostró los resultados de acuerdo a los procedimientos, se eligió una trayectoria que asemeja a la de un paso cuasi estático para nuestro efector final, luego sintonizaremos los parámetros de Control PID: proporcional (Kp), derivativo (Kd) e integral (Ki), para cada uno de nuestros motores. Mostrando la secuencia del desplazamiento obtenido para la trayectoria dada, esta secuencia se dio eligiendo un control PID con los siguientes parámetros: A. articulación 1: Kp1=210, Ki1=10. Kd1=15; B. articulación 2: Kp2=80, Ki2=10. Kd2=2; C. articulación 3: Kp3=400, Ki3=10. Kd3=0.6. Finalmente para mostrar que nuestro control funciona correctamente, graficamos los erros obtenidos de la data de la posición angular de los motores, notamos que se llega a un tiempo establecimiento en corto tiempo.
Según investigadores (Ander y Tainta, 2017). El objetivo de este proyecto consiste en un pequeño robot capaz de mantener el equilibrio sobre sus dos ruedas mediante un control digital PID basado en Arduino. Además se plantea añadir un módulo de conexión inalámbrica para su control mediante un dispositivo Smartphone en tiempo real. Tras comprobar el correcto funcionamiento de los diferentes sensores que se van a emplear, se diseña una PCB en la que se recogen los elementos necesarios para el correcto funcionamiento del robot. Una vez finalizado el diseño eléctrico, se debe realizar el diseño mecánico de las diferentes piezas que formaran la estructura. Estas piezas se diseñaran mediante la herramienta de dibujo SolidWorks para después ser impresas en 3D. Por último, se implementa el software necesario que permite tanto el auto-equilibrado del robot como su control mediante un Smartphone.
3. METODOLOGIA
Según la currícula educativa, ciertas sesiones de aprendizaje son con el uso de la Robótica, se tomó un caso, para definir en qué momentos es recomendable aplicar el Algoritmo de Control para un proceso de enseñanza-aprendizaje efectivo.
Se ha tomado a trabajar de ejemplo un tipo de robot trabajado en las clases de aprendizajes de robótica educativa, con los cuales comprueba la efectividad de la aplicación del algoritmo de control utilizado. En ambas herramientas se percibe un buen grado atracción para los niños. El robot elegido para esta investigación: Carrito seguidor de línea.
CONSTRUCCIÓN DE LOS MODELOS ROBÓTICOS
Carrito Seguidor de Línea, los robots seguidores de línea son robots capaces de seguir una línea marcada en el suelo. Normalmente esta línea es de color negro sobre un fondo blanco. Usaremos un Algoritmo de control PID para seguir la línea. Si ambos sensores detectan NEGRO el robot seguirá avanzando.
Cuando los sensores de la derecha detectan BLANCO y el los de la izquierda NEGRO, el robot girará a la izquierda y cuando eso ocurra el caso contrario girará a la derecha. Si ambos sensores leen BLANCO, el robot permanecerá parado.
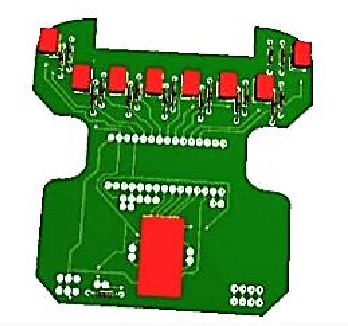
Fig. 1- Placa terminada circuito electrónico – carrito seguidor de línea. (Vista 3D)
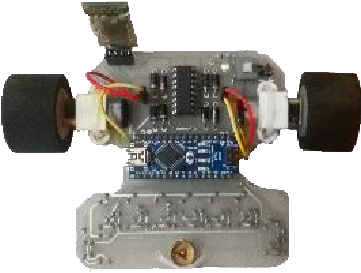
Fig. 2- Construcción Carrito seguidor de línea
Sensores del seguidor de línea: Un rastreador detecta la línea a seguir por medio de dos sensores. Hay muchos tipos de sensores que se pueden usar para ese fin; sin embrago, los más populares son los sensores infrarrojos (IR), que en su versión más común constan casa uno del dúo: LED infrarrojo más fototransistor. El primero emite una pequeña señal infrarroja que será “rebotada o absorbida” dependiendo de la base (fondo blanco o línea negra) y esta será detectado por el fototransistor. Para nuestro carrito seguidor consideramos que la salida de estos sensores será “0” cuando vean “blanco” y “1” cuando vean “negro”.
APLICACIÓN DE ALGORITMOS DE CONTROL BÁSICO
Donde son usados en la robótica educativa, para ver su funcionamiento e implementar luego los algoritmos de control robótico: Algoritmo de control básico de carrito seguidor de línea, en este algoritmo de control básico se trabajó por casos en cual los sensores van detectando el recorrido de la pista (blanco 1 y negro 0). Dando un movimiento de rastreo en forma de zigzag (oscilando). Algoritmo de control básico de Carrito detector de obstáculos, se trabajó con dos condiciones, donde se detecta una distancia mayor a la requerida el robot avanza, sino pasa eso entonces en robot retrocede.
Se comparó los algoritmos de control robótico estudiados por los investigadores científicos algoritmos: planificación de trayectorias, PID (proporcional, derivada, integral), lógica difusa, genéticos, redes neuronales. Según sus características para su mejor elección y se vea acorde a los casos de aprendizaje de los estudiantes. Se estableció un puntaje de 0-5 puntos a los algoritmos robóticos a elegir con alto puntaje lo obtuvieron los Algoritmos PID y Lógica Difusa consideradas como una solución factible a problemas de control básico en robótica educativa.
Se aplicó los algoritmos pertinentes para los casos de aprendizaje, la elaboración de los modelos implicó la aplicación de los algoritmos seleccionados, los cuales están representados en el “Carrito seguidor de línea” con PID; y el “Carrito detector de obstáculos” con LÓGICA DIFUSA.
ALGORITMO CONTROL PID

El control del robot seguidor de línea construido, es una combinación de la aplicación de control Proporcional, Integral, Derivada (PID).
El control PID, (Aprendiendo, 2014), un PID (control proporcional, integral y derivado) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener (set point, target position o punto de consigna), para aplicar una acción correctora que juste el proceso.
El caso del robot seguidor de línea, el controlador PID (que es una rutina basada matemáticamente), procesara los datos del sensor, y lo utiliza para controlar la dirección (velocidad de cada motor), para de esta forma mantenerlo en curso.
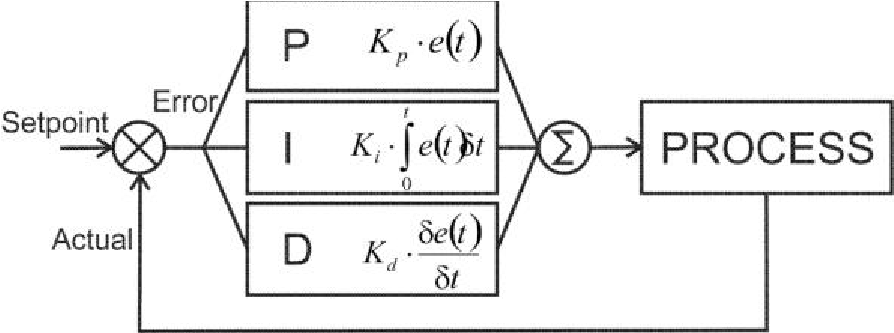
Fig. 3- Rutina matemática controlador PID
Término (Pérez, 2013).Proporcional, el término proporcional modifica la salida proporcionalmente con el error actual. La respuesta proporcional se puede ajustar multiplicando el error por una constante 𝐾𝑝 , conocida como ganancia proporcional. Siendo
“e” el error en un instante de tiempo, cuando mayor sea este error más rápida será la respuesta y viceversa. Un controlador proporcional no siempre alcanzará su valor objetivo, ya que no se eliminará el error de estado estacionario. Para eliminarlo hay que emplear el término integral.
𝑃 = 𝐾𝑝𝑒(𝑡)
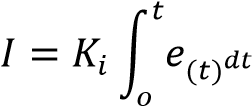
Integral, el término integral es proporcional a la magnitud del error y a la duración del error. Es decir, la suma de todos los errores en cada instante de tiempo “o”, como indica su nombre, la integración de todos los errores. Esta suma compensa la diferencia que debería haber sido corregida anteriormente. El error acumulado se multiplica por la ganancia integral 𝐾𝑖 que indicará la cantidad integral respecto de toda la acción de control.
Derivado, el término derivativo calcula la variación del error mediante la pendiente del error en cada instante de tiempo, es decir, la primera derivada con respecto al tiempo y multiplica esa variación del error con la ganancia derivativa 𝐾𝑑 , la cual indica la cantidad de acción derivativa respecto de toda la acción de control.
Constantes:
Factor (Kp), es un valor constante utilizando para aumentar o reducir el impacto de Proporcional. Si el valor es excesivo, el robot tendrá responder inestablemente, oscilando excesivamente. Si el valor es muy pequeño, el robot responderá muy lentamente, teniendo a salirse de las curvas.
Factor (Ki), es el valor constante utilizando para aumentar o reducir el impacto de la integral, el valor excesivo de esta provocará oscilaciones excesivas. Un valor demasiado bajo no causara impacto alguno. Generalmente este constante está en el orden de los decimales.
Factor (Kd), es el valor constante utilizando para aumentar o reducir el impacto de la derivada. Un valor excesivo provocara una sobre amortiguación provocando inestabilidad.
Generalmente este valor es mayor que el factor Kp.
Medida de error:
Error, Llamamos a la diferencia entre la posición objetivo y la posición medida del error. (Que tan lejos del punto de consigna se encuentra el sensor, en nuestro caso el objetivo es tener los sensores centrados).
-
error
SI3
SI2
SI1
SD1
SD2
SD3
-5
1
1
1
1
1
0
-4
1
1
1
1
0
0
-3
1
1
1
1
0
1
-2
1
1
1
0
0
1
-1
1
1
1
0
1
1
0
1
1
0
0
1
1
1
1
1
0
1
1
1
2
1
0
0
1
1
1
3
1
0
1
1
1
1
4
0
0
1
1
1
1
5
0
1
1
1
1
1
Tabla 1: Tabla de verdad – medida de error, definimos el comportamiento de error, a través de una tabla de verdad,
trabajador por 6 sensores: SI1,SI2, SI3 (sensores izquierdo) y SD1, SD2, SD3 (sensores derecho)
4. EXPERIMENTOS Y RESULTADOS
Se utilizó una Placa Arduino Nano para la programación de los robots, (Ballesteros, 2013). Arduino es una placa electrónica que contiene un microcontrolador. (Torroja, 2008)Arduino se programa en el lenguaje de alto nivel C/C++ y generalmente tiene los siguientes componentes para elaborar el algoritmo: estructuras, variables, operadores matemáticos: lógicos y booleanos, estructuras de control (condicionales y ciclos), funciones.
Recolección de datos, Se recopila la información de las pruebas de los experimentos haciendo pruebas de validación:
Se usó hojas de validación de pruebas para los robots, calificando un puntaje según los criterios establecidos.
Uso del dispositivo Bluetooth, para la comunicación del robot hacia la Pc mostrando en pantalla el funcionamiento que tienen cada robot.
PRUEBAS DE VALIDACIÓN CARRITO SEGUIDOR DE LÍNEA:
Seguidor de línea, recorre en PISTA con el algoritmo de control PID (se implementó solo con la proporcional y la derivada – PD).
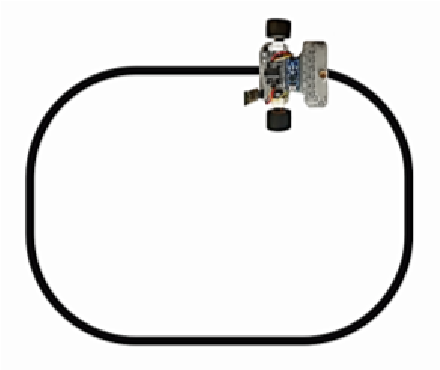
Fig. 4- Primera pista de prueba, pista circular
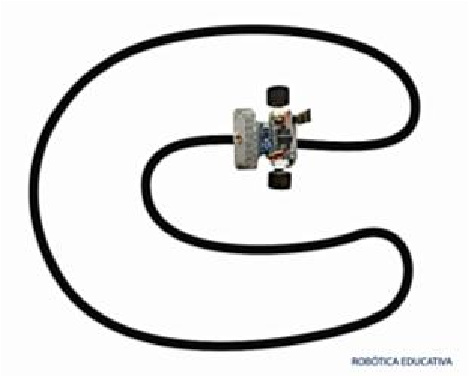
Fig. 5- Segunda pista de prueba, pista con líneas ovaladas

Fig. 6- Tercera pista de prueba, pista con líneas ovaladas y rectas.
Se interpretó los resultados mostrando en pantalla conectando al robot en Bluetooth, realizando su recorrido en pistas de prueba:
PID – Proporcional, Integral y Derivada, en esta prueba el termino integral no ayuda a un buen control en estado estacionario (línea recta) ya que en dicho estado se encuentra en errores acumulados. Fig. 7

Fig. 7- Velocidad de la proporciona, integral y derivada
5. DISCUSIÓN
Se ha observado el funcionamiento de un algoritmo de control básico en un robot (carrito seguidor de línea) donde se implementó un algoritmo de control robótico (PID). Demostrando su mejor funcionamiento de dicho algoritmo el buen uso en el proceso de transporte, donde el sistema tiene raíces positivas lo cual nos indica que se trata de un sistema estable, el tiempo de estabilización es próximo a cero es decir muy bueno, el controlador PID mejora mucho la respuesta del sistema, el sistema es similar a los frenos en los vehículos. El coeficiente “Ki” debe ser pequeño para evitar vibraciones del servo motor.
Con el algoritmo PID se demostró que para los seguidores de línea su “integral” de este control no se utilizó, porque tiene que ver con errores acumulativos ocasionados por estados estacionarios, es decir cuando el robot está totalmente detenido o en movimiento con velocidad constante a los largo de la trayectoria en su recorrido por la pista se está acelerando y desacelerando, el robot experimenta cambios dinámicos que imposibilitan el uso de este parámetro haciéndolo tener a 0, evitando las vibraciones. (Es decir no se usó).
6. CONCLUSIONES
A lo largo de la investigación se han revisado distintos algoritmos de control robótico enfocados a la resolución de un problema específico, sin embargo ha sido necesario que este estudio abarque metodología de aprendizaje educativo. El paso importante ahora es hacer una apropiada selección de ideas que sirvan para la implementación de los algoritmos de control robótico en Kits robóticos educativos.
La optimización del lazo de control PID permite un incremento importante de velocidad y el control de la velocidad en diferentes tipos de tramos de la pista, tanto en las rectas como en la curvas, empleamos la debida operación para mantener una velocidad deseada en el tramo en el que se encuentre. Las funciones que se gobiernan el movimiento de los motores, sensores infrarrojos son de sencilla aplicación. Las librerías aplicadas pueden presentarnos un buen seguimiento de los valores que han sido obtenidos por los sensores de energía y de posición en la pista, necesarios para el buen desenvolvimiento del seguidor de línea.
6. REFERENCIA
Ander y A. S. Tainta. (2017). «Diseño y construcción de un robot auto-balanceado mediante Arduino,» E.T.S. de Ingeniería Industrial, Informática y de
Telecomunicación, Pamplona, 2017.
Aprendiendofacilelectronica. (2014). «Robot Velocista de compentencia Algoritmo PID,» Diciembre 2014. [En línea]. Available: http://aprendiendofacilelectronica.blogspot.com/2014/1 2/robot-velocista-de-competencia_4.html.
Ballesteros y M. d. R. Carbajo. (2013). «Control de posición de un balancín con arduino,» Valladolid.
Daniel, J. R. Osio y M. D. Martín (2006). «Metodología para el estudio de desarrollo de software por medio de Robots Móviles,» Universidad Nacional Arturo JauretcheInstituto de Ingenieria-Ingenieria Informática, Argentina.
Jara, E. E. Alfaro y D. R. A. a. R. R. Rodriguez. (2010).«Modelamiento y control de un Robot Bípedo Usando un Sistema Operativo Implementado en un DSP,» UNI - GISCIA , Departamento de Ingeniería Mecánica de la Universidad Nacional de Ingeniería, Perú.
Motos, josé Luis Pérez. (2013). «Robot rasteador con interfaz Bluetooth /Android,» Proyecto diseños y construcción de un robot seguidor de líneas, Pamplona.
Torroja, I. Gonzáles y A. Ramos. (2008).«Taller de electrónica para usos creativos: practicando con Arduino,» Open lab.